Prosthetic Hand
Under-actuated Prosthetic Hand, 2011.
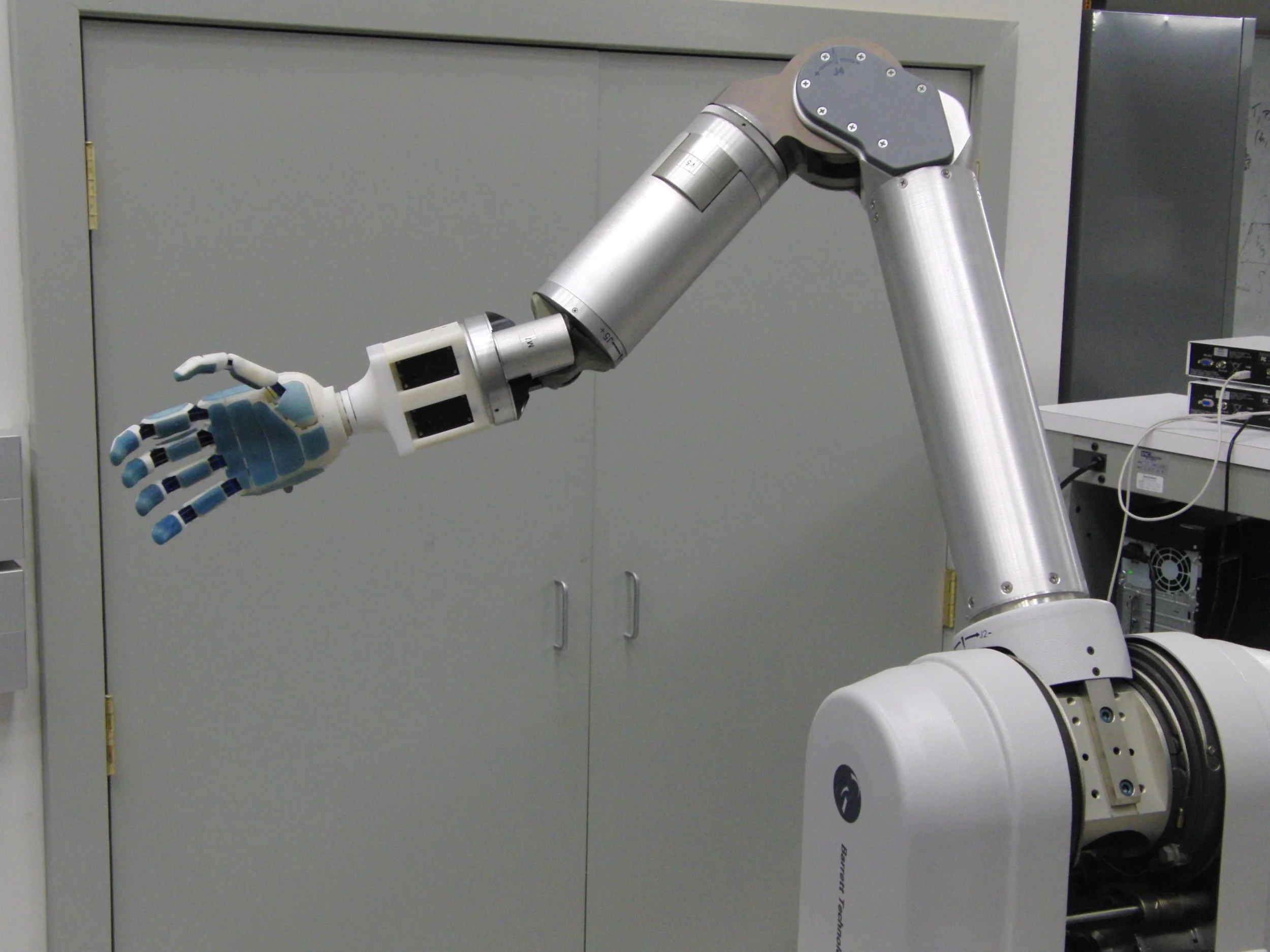
The body-powered prosthetic hand was a Ph.D. thesis project for a graduate student in the Grab Lab at Yale. It aims to be a passive, under-actuated, and anthropomorphic prosthetic powered by a traditional shoulder harness used by many upper body amputees. While most modern prosthetics are complex and expensive, this project hopes to bring a cheaper and more effective alternative. My part in the project was designing and manufacturing the fingers, grips, and palm for the hand.


The Grab Lab manufactures robot hands through a process called Shape Deposition Manufacturing. In order to adapt this technique for a much more geometrically complex design, we experimented with new mold-making techniques. This prototype is the result of a multi-stage CNC milling and casting process.



















